江蘇FXDP100晶舟轉換器公司
晶舟轉換器的高精度與高可靠性:晶舟轉換器采用先進的機械結構、高精度的傳動部件和精密的控制系統,能夠實現極高的定位精度和運動穩定性。在半導體制造過程中,對晶舟的搬運精度要求極高,任何微小的偏差都可能導致晶圓的損壞或生產工藝的失敗。晶舟轉換器的高精度特性,能夠確保晶舟在轉移過程中的位置精度控制在極小的范圍內,有效降低了生產過程中的次品率。同時,其高可靠性的設計和制造工藝,使得設備在長時間連續運行過程中能夠保持穩定的性能,減少了設備故障和停機時間,提高了生產效率。晶舟轉換器在半導體產業鏈中扮演著重要角色,推動了整個產業的發展和升級。江蘇FXDP100晶舟轉換器公司
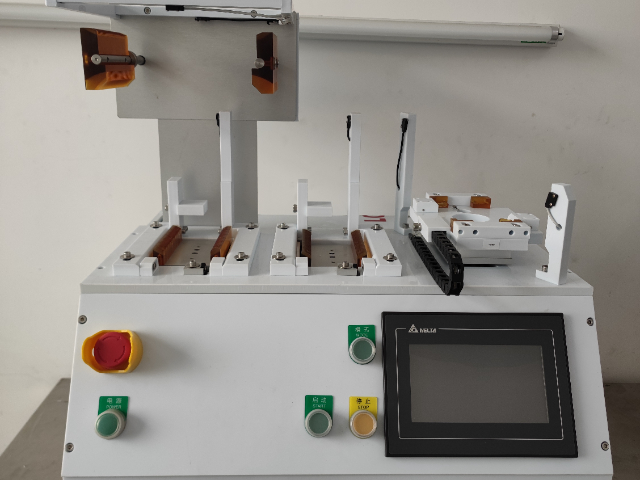
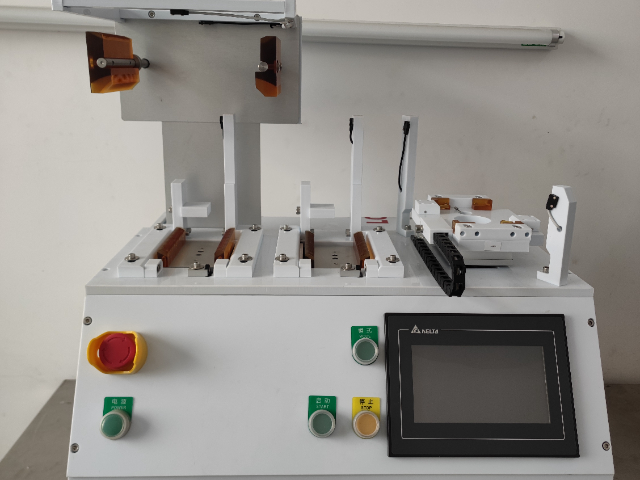
晶舟轉換器的關鍵部件檢查:
傳動部件:檢查傳動鏈條、皮帶等部件的張緊度,確保其松緊適度。若發現鏈條有松動或磨損,應及時調整或更換;對于皮帶,若出現老化、龜裂等情況,需立即更換。同時,定期為傳動部件添加適量的zhuan yong潤滑劑,減少摩擦,確保傳動順暢。
傳感器:晶舟轉換器的各類傳感器(如位置傳感器、光電傳感器等)對于精 zhun 轉換至關重要。定期檢查傳感器的工作狀態,確保其能準確感應晶舟的位置和狀態。如發現傳感器讀數異常或不靈敏,需及時校準或更換。
電氣連接:仔細檢查設備內部的電氣連接線路,查看是否有松動、氧化或破損的情況。對于松動的連接點,要及時擰緊;若線路出現氧化或破損,應進行清潔或更換,以保證電氣連接的穩定性和安全性,避免因接觸不良導致設備故障。 江蘇FXDP100晶舟轉換器公司無論是在數據傳輸速度還是轉換效率上,這款轉換器都表現出色。
晶舟轉換器在半導體制造中的地位:
在半導體制造這一復雜而精密的生產體系中,晶舟轉換器扮演著至關重要的角色,猶如生產線上的“智能搬運工”,負責在不同工藝環節之間安全、高效、精確地轉移晶圓。晶圓作為半導體芯片制造的基礎載體,其在生產過程中需要經過光刻、蝕刻、離子注入、薄膜沉積、測試等數十道甚至上百道工序。每一道工序都對晶圓的位置精度、表面潔凈度以及轉移過程中的穩定性有著極高的要求。晶舟轉換器正是為滿足這些嚴苛要求而設計的關鍵設備,它確保晶圓在不同設備之間的轉移過程中不受損傷,保持精確的位置和方向,從而保證整個制造工藝的連續性與一致性。以光刻工藝為例,光刻是將芯片設計圖案轉移到晶圓表面的關鍵步驟,要求晶圓定位精度達到納米級別。晶舟轉換器需要將晶圓從存儲晶舟中精 zhun 取出,放置到光刻設備的工作臺上,并確保晶圓的位置偏差在允許的極小范圍內。如果晶舟轉換器的精度不足,光刻圖案可能會出現偏差,導致芯片性能下降甚至報廢。在后續的蝕刻、離子注入等工藝中,晶舟轉換器同樣承擔著精 zhun 轉移晶圓的重任,其性能直接影響到芯片的質量與成品率。
若晶舟轉換器配備稱重部件,其保養對確保晶圓重量檢測準確很關鍵。定期清潔稱重傳感器表面,去除灰塵和雜物,避免影響稱重精度。清潔時要小心操作,防止損壞傳感器。檢查稱重平臺是否平整,有無變形或磨損。若稱重平臺不平整,會導致稱重數據不準確,需及時修復或更換。定期對稱重部件進行校準,使用標準砝碼進行稱重測試,對比顯示數值與標準砝碼重量是否一致。若存在偏差,按照校準流程進行調整。做好稱重部件保養,能為晶圓質量控制提供準確的重量數據。在教育領域,晶舟轉換器能讓教師輕松地將教學資料從電腦傳輸到教室的多媒體設備上。

晶舟轉換器的工作基于自動化控制和機械運動原理。當接收到倒片指令后,控制系統首先根據晶圓的當前位置和目標位置,計算出機械臂的運動軌跡和翻轉機構的動作參數。然后,控制系統驅動機械臂運動,使其末端的吸附或夾取裝置準確地到達晶圓上方,通過真空吸附或機械夾取的方式將晶圓固定住。接著,機械臂按照預定軌跡將晶圓移動到翻轉機構的指定位置,翻轉機構在電機的驅動下將晶圓平穩地翻轉到所需角度,機械臂再將翻轉后的晶圓搬運到目標承載面上,完成晶圓的倒片操作。在整個過程中,定位與校準系統不斷監測晶圓的位置和姿態,實時向控制系統反饋信息,控制系統根據反饋數據對機械臂和翻轉機構進行微調,以確保倒片過程的高精度和可靠性。晶舟轉換器支持多種網絡接口轉換,滿足不同網絡環境下的連接需求。四川FANHUA晶舟轉換器源頭廠家
無論是在家庭、辦公室還是專業領域,晶舟轉換器都能提供靈活的接口轉換方案,滿足各種連接需求。江蘇FXDP100晶舟轉換器公司
工作原理晶舟識別與定位:當晶舟進入晶舟轉換器的工作區域時,定位與檢測系統中的傳感器會首先對晶舟進行識別和定位。通過激光傳感器或視覺傳感器等設備,獲取晶舟的位置、姿態和形狀等信息,并將這些數據傳輸給控制系統。抓取與搬運:控制系統根據接收到的晶舟位置信息,計算出機械臂的運動軌跡和動作參數,然后發送指令給驅動與傳動系統。機械臂在驅動系統的帶動下,按照預定的軌跡運動,其末端的夾具或吸盤到達晶舟上方后,通過機械夾緊或真空吸附等方式將晶舟牢牢抓取。隨后,機械臂將晶舟從初始位置搬運到指定的目標位置。轉換操作:在將晶舟搬運到目標位置后,晶舟轉換器可能需要進行各種轉換操作,如晶舟的翻轉、旋轉、堆疊等。這些操作同樣由機械臂在控制系統的精確控制下完成。例如,通過機械臂的特定動作和夾具的配合,實現晶舟的180度翻轉,以便對晶舟內的晶圓進行不同面的處理。江蘇FXDP100晶舟轉換器公司
- 重慶水平甩干機多少錢 2025-06-22
- 北京雙腔甩干機報價 2025-06-22
- 浙江單腔甩干機生產廠家 2025-06-22
- 江蘇SIC甩干機哪家好 2025-06-22
- 四川雙工位甩干機源頭廠家 2025-06-22
- 福建SIC甩干機 2025-06-22
- 氮化鎵甩干機報價 2025-06-22
- 江蘇FXDP100晶舟轉換器公司 2025-06-22
- 雙腔甩干機生產廠家 2025-06-22
- 天津雙腔甩干機生產廠家 2025-06-22
- 臨平區大型機械設備裝卸平臺 2025-06-22
- 陜西熱熔膠熱壓機出廠價 2025-06-22
- 麗水節能電機哪種好 2025-06-22
- 江蘇高速精密激光切管機質量 2025-06-22
- 上海廚房后場地溝隔渣籃 2025-06-22
- 整合研磨機推薦 2025-06-22
- 海珠ABB工業機器人控制器 2025-06-22
- 湖州數控機床直銷 2025-06-22
- 寶山區自動化工業機器人 2025-06-22
- 廣州進口邏輯控制器(PLC)一般多少錢 2025-06-22