攪拌車360環(huán)視攝像頭廠家直銷
360全景與倒車影像的區(qū)別?一個全景一個是只能看后車尾位置對于駕駛技術不熟練的司機來說有必要,目前在此系統(tǒng)的基礎上又衍生出一些新的科技,比如自動泊車系統(tǒng)。自動泊車系統(tǒng)是通過攝像頭來識別車位,然后自己進入車位的技術。這項技術就需要通過攝像頭和測距雷達的配合來偵測障礙物以及識別車位。更有一些豪華品牌已經(jīng)實現(xiàn)了自動駕駛技術,也是基于此科技來實現(xiàn)的。可以讓駕駛員在輕度或者重度越野路段通過攝像頭來掌握車輛四周的復雜路況。這樣遇到越野路段時就不用下車查看了。提高了通過越野路段的安全性同時也方便了駕駛員在車內更準確的判斷車身周圍的路況。360全景影像主機采用的是國外進口的芯片,程序運行速度快。攪拌車360環(huán)視攝像頭廠家直銷
360全景
(下篇)車載AI360全景影像系統(tǒng)的技術原理: AI算法通過深度學習等技術對圖像中的目標進行特征提取和識別,能夠準確地識別出車輛周圍的行人、車輛、障礙物等物體。物體識別精度:AI算法通過不斷優(yōu)化和訓練,提高物體識別的精度和魯棒性。它能夠應對不同光照條件、遮擋情況、復雜背景等挑戰(zhàn),確保識別的準確性和可靠性。四、預警機制設計預警觸發(fā)條件:當AI算法識別到潛在的危險源時,如行人、車輛等物體靠近車輛到一定距離時,系統(tǒng)會觸發(fā)預警機制。預警方式:預警方式可以包括聲光預警、語音提示等。系統(tǒng)會通過車載顯示屏、揚聲器等設備向駕駛員發(fā)出預警信號,提醒駕駛員注意潛在的危險。五、系統(tǒng)穩(wěn)定性與可靠性抗干擾能力:車載環(huán)境復雜多變,系統(tǒng)需要具備較強的抗干擾能力,以應對電磁干擾、振動、溫度變化等不利因素的影響。故障自診斷與恢復:系統(tǒng)應具備故障自診斷與恢復能力,能夠在發(fā)生故障時及時報警并嘗試恢復正常運行,確保行車安全。綜上所述,車載AI360全景影像系統(tǒng)的技術原理,通過集成AI算法實現(xiàn)預警與物體識別功能的技術原理是一個復雜而精細的過程。它涉及到圖像采集與傳輸、圖像拼接與融合、AI算法集成與物體識別以及預警機制設計等多個方面。 攪拌車360環(huán)視攝像頭廠家直銷360全景和雷達融合用于機器人導航作業(yè)監(jiān)控,獲取周圍全景視圖,實時檢測障礙物和動態(tài)目標,自主導航和避障.
360度全景攝像就是一次性收錄前后左右的所有圖像信息,沒有后期合成,更沒有多鏡頭拼接。其原理依據(jù)仿生學采用物理光學的球面鏡透射加反射原理一次性將水平360度,垂直180度的信息成像,再采用硬件自帶的軟件進行轉換,以人眼習慣的方式呈現(xiàn)出畫面。一般來說,焦距越短,視角越大,而視角越大,因光學原理產生的變形也就越強烈。為了達到水平360度,垂直180度的超大視角,魚眼鏡頭允許桶形畸變合理存在,除了畫面中心的景物保持不變,其他本應水平或垂直的景物都發(fā)生了相應的變化。為了把畸變后的圖象轉化為適合于人眼觀看的正常圖像,需要通過軟件對圖像進行坐標變換,并進行圖像修正等處理。
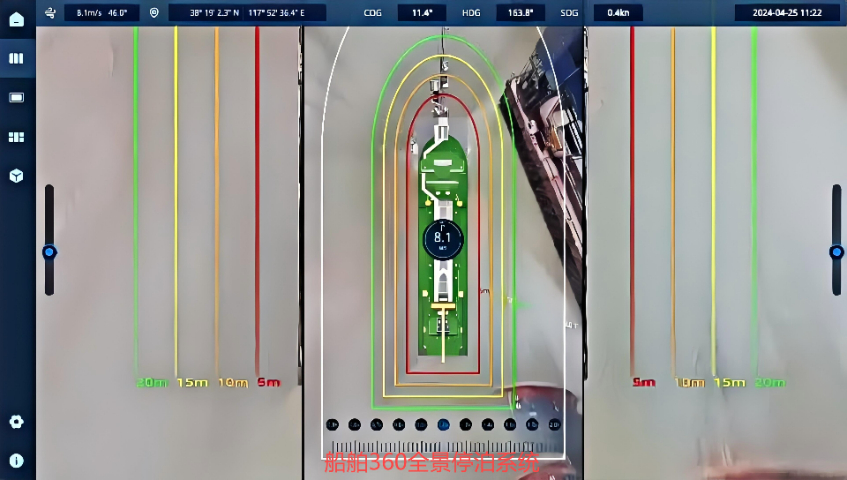
360度全景泊車影像系統(tǒng)(又名AVM全景式監(jiān)控影像系統(tǒng),360度全景攝像頭、360度全景影像系統(tǒng)、360度全景泊車系統(tǒng)、360度全景可視系統(tǒng)、360度全景倒車環(huán)視系統(tǒng)),通過安裝在車身前后左右的4個超廣角攝像頭同時采集車輛四周的影像,經(jīng)過“實時圖像畸變還原對接技術”對圖像進行畸變還原—視角轉化—圖像拼接—圖像增強等處理,較終形成一幅無縫完整的車周全景鳥瞰圖。該系統(tǒng)不但可以顯示全景圖,還可同時顯示任一方向的單視圖;駕駛員通過配合標尺線能夠準確讀出障礙物的位置和距離。車侶360全景影像與北斗主動安全的融合作用。

(第3篇)車侶AI 360全景影像系統(tǒng)網(wǎng)口輸出、BSD盲區(qū)預警與4G云臺車輛運營管理技術集成到機器人身上,可形成一套多功能、智能化的機器人解決方案,適用于工業(yè)巡檢、特種作業(yè)、物流運輸?shù)葓鼍啊R韵聻榫唧w應用分析:
三、技術挑戰(zhàn)與解決方案實時性與穩(wěn)定性挑戰(zhàn):全景影像與盲區(qū)預警需高算力支持,4G網(wǎng)絡可能存在延遲。方案:采用邊緣計算(EdgeComputing)技術,在機器人端進行初步數(shù)據(jù)處理,減少云端傳輸壓力。多傳感器融合挑戰(zhàn):全景影像、盲區(qū)預警與4G云臺需協(xié)同工作,避免數(shù)據(jù)沖TU。方案:建立統(tǒng)一的數(shù)據(jù)總線與調度算法,確保各模塊高效協(xié)作。安全性挑戰(zhàn):機器人作業(yè)可能涉及敏感區(qū)域,需防止數(shù)據(jù)泄露或被惡意控制。方案:采用加密通信協(xié)議與權限管理系統(tǒng),確保數(shù)據(jù)傳輸與云端訪問安全。
四、未來發(fā)展趨勢5G與AIoT融合:5G網(wǎng)絡將進一步提升數(shù)據(jù)傳輸速度與穩(wěn)定性,支持更高分辨率的全景影像與更復雜的AI算法。多模態(tài)感知:結合激光雷達、超聲波傳感器等,提升機器人在復雜環(huán)境中的感知能力。自主決策:通過深度學習與強化學習,使機器人具備更強的自主決策能力,減少對云端依賴。
360全景能讓駕駛員通過配合標尺線能夠準確讀出障礙物的位置和距離。汽車360影像系統(tǒng)價格
360全景影像和全息影像區(qū)別:前者通過攝像頭將實物呈現(xiàn),后者通過光的物理衍射干涉現(xiàn)象將實物立體呈現(xiàn)。攪拌車360環(huán)視攝像頭廠家直銷
360全景影像怎么調試左右?先把360度全景攝像頭出來,調試好;前攝像頭位置,前攝像頭采用螺釘固定方式,無需打孔;后置攝像頭位置、和前置攝像頭安裝流程;左攝像頭,安裝在后視鏡下,用電鉆鉆孔固定即可;右攝像機,同上;調試攝像頭的監(jiān)控的角度,一般車體占1/5就好;根據(jù)車內顯示屏的圖像微調攝像機角度;然后看四個角度的影像,是不是可以形成一個全景圖,攝像的角度,一定要拍攝到圖像的清晰和寬廣的范圍。360全景影像設置時速?我們只需要打開360全景的主界面選擇“功能配置”,在“功能配置”界面能看到“車速控制”,根據(jù)自己需要的速度來設置車速控制數(shù)值即可。在正常行駛過程中,如果我們超速,360全景就會提示我們超速。通過360全景就可以清楚地了解車輛的行駛速度。攪拌車360環(huán)視攝像頭廠家直銷
- 車輛改裝360全景環(huán)視設備廠家供應 2025-06-09
- 龍門架360全景影像設備廠家 2025-06-09
- 車輛改裝360全景環(huán)視系統(tǒng)安裝 2025-06-09
- 車載360全景影像系統(tǒng)安裝 2025-06-09
- 叉車360全景可視系統(tǒng)采購 2025-06-09
- 廣西建筑物多路視頻拼接系統(tǒng)定制開發(fā) 2025-06-08
- 壓裂車360全景環(huán)視系統(tǒng) 2025-06-08
- 車輛360影像系統(tǒng)生產廠家 2025-06-08
- 天津建筑物多路視頻拼接系統(tǒng)開發(fā)商 2025-06-08
- 福建卡車多路視頻拼接系統(tǒng)推薦廠家 2025-06-08
- 濟寧小汽車改裝 2025-06-09
- 寧波鍛件花鍵軸廠 2025-06-09
- 上海優(yōu)良汽車配件報價 2025-06-09
- 蕪湖優(yōu)勢機械停車主機架廠家電話 2025-06-09
- 常州無痕雙面膠供應商 2025-06-09
- 淄博改大燈有哪些 2025-06-09
- 閔行區(qū)汽車花鍵套冷擠壓件 2025-06-09
- 黃山定制停車管理收費系統(tǒng)現(xiàn)價 2025-06-09
- 聊城換氙氣大燈聯(lián)系方式 2025-06-09
- 熱固化ConshieldVK8144詳細參數(shù) 2025-06-09