上海制造芯片引腳整形機設備
半自動芯片引腳整形機的設計理念結合了自動化與人工干預,既降低了人工操作強度,又提升了效率。其**特點包括高精度和高穩定性,確保加工過程不損傷芯片性能;操作和維護簡便,延長設備使用壽命;同時具備多芯片類型的適應性,滿足多樣化需求。創新方面,設備采用智能控制系統,實現高精度加工和快速故障診斷,提升生產效率;配備高性能傳動系統,結合精密傳感器和反饋控制,確保加工穩定性和精度;模塊化設計則使部件標準化,便于維護、升級和快速更換夾具、刀具等,進一步提高生產靈活性和效率。半自動芯片引腳整形機的成本是怎樣的?與手動整形相比有哪些優劣勢?上海制造芯片引腳整形機設備
BGA(Ball Grid Array)是一種表面貼裝技術,廣泛應用于現代電子設備的制造中。然而,由于各種原因,BGA組件可能需要進行返修,以修復焊接或其他問題。BGA返修臺是專門設計用于執行這項任務的工具,BGA返修臺是現代電子制造和維修工作中不可或缺的工具,能夠精確地執行BGA組件的返修工作。了解其工作原理、正確的使用方法以及關鍵優勢對于確保BGA組件的可靠性和質量至關重要。在選擇和使用BGA返修臺時,應始終遵循相關的安全操作規程和最佳實踐,以確保工作安全和效率。上海銷售芯片引腳整形機廠家批發價如何對半自動芯片引腳整形機進行定期的點檢和巡檢?
通過部分c3中的層120的上表面的熱氧化以及部分t3中的襯底的熱氧化獲得層220。熱氧化可以增加層200的厚度。推薦地,在步驟s5之后,三層結構140的厚度在約12nm至約17nm的范圍內,推薦地在12nm至17nm的范圍內,例如。推薦地,在步驟s5之后,層200的厚度在約4nm至約7nm的范圍內,推薦地在4nm至7nm的范圍內,例如。層220的厚度推薦小于層200的厚度。推薦地,層220的厚度在約2nm至約3nm的范圍內,推薦地在2nm至3nm的范圍內,例如。在圖2c中所示的步驟s6中,在步驟s5之后獲得的結構上形成包括摻雜多晶硅或摻雜非晶硅的導電層240。層120是完全導電的,即不包括絕緣區域。推薦地,層240由摻雜多晶硅制成。作為變型,層240包括導電子層,例如金屬子層,導電子層具有擱置在其上的多晶硅。層240具有在每個部分c1、c2、c3、m1、t2和t3中的一部分。層240的這些部分被定位成與部分c1、c2、c3和m1的層120的部分豎直排列。層240推薦地與部分m1和c1中的三層結構140接觸。在部分c2和c3中,層240分別與層200和220接觸。在部分t2中,層240推薦地與層200接觸,但是可以在層200和層240之間提供一個或多個附加層,例如介電層。在部分t3中,層240推薦地與層220接觸。
本發明涉及燈具制造技術領域,特別涉及一種驅動電源軟針引腳繞絲工藝。背景技術:現有led燈絲燈使用的電源驅動普遍具有微小復雜的特點,單個驅動上布置的元器件密集,導致現有繞絲棒無法伸入驅動內部對驅動引腳進行繞絲工作。根據申請號為、名稱為“led燈絲燈的驅動繞絲裝置”的文獻公開了一種驅動繞絲裝置,解決了現有由技術工人手工將led燈絲燈的玻璃燈泡上的兩根導絲分別繞制到驅動元件的兩根引腳針上所產生的技術問題。該篇公開文獻中繞絲機構中的繞絲棒仿制工人手工繞制導絲,完成半成品燈泡與驅動元件的組裝。生產時減少大量的人力成本,不需要過多的操作人員且極大提高了生產效率和產品的合格率。根據申請號為、名稱為“仿手工繞絲棒”的文獻公開了一種仿手工繞絲棒,解決了現有技術工人手工將led燈絲燈的玻璃燈泡上的兩根導絲分別繞制到驅動元件的兩根引腳針上,然后再進一步將整個燈絲燈組裝在一起所產生的技術問題。該篇公開文獻使玻璃泡與電子驅動件之間連接緊密,降低了led燈絲燈組裝過程中的難度,縮短了led燈絲燈的總裝速度,整體裝配效率**提高。綜上所述:根據上述兩篇公開文獻,為了完成電源驅動的自動繞絲工作重新設計了一種生產工藝。在使用半自動芯片引腳整形機時,如何保證生產過程中的衛生和清潔度?

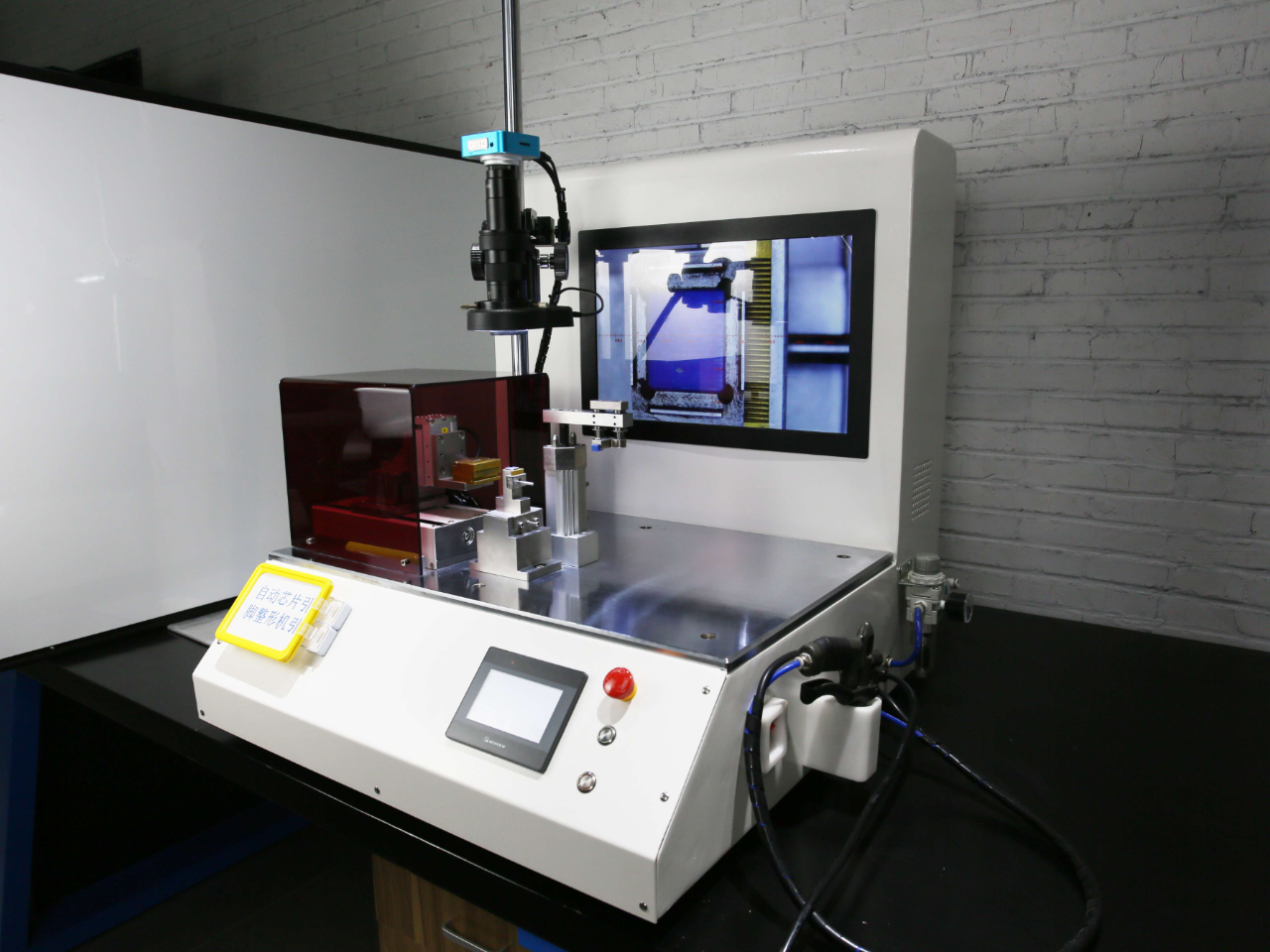
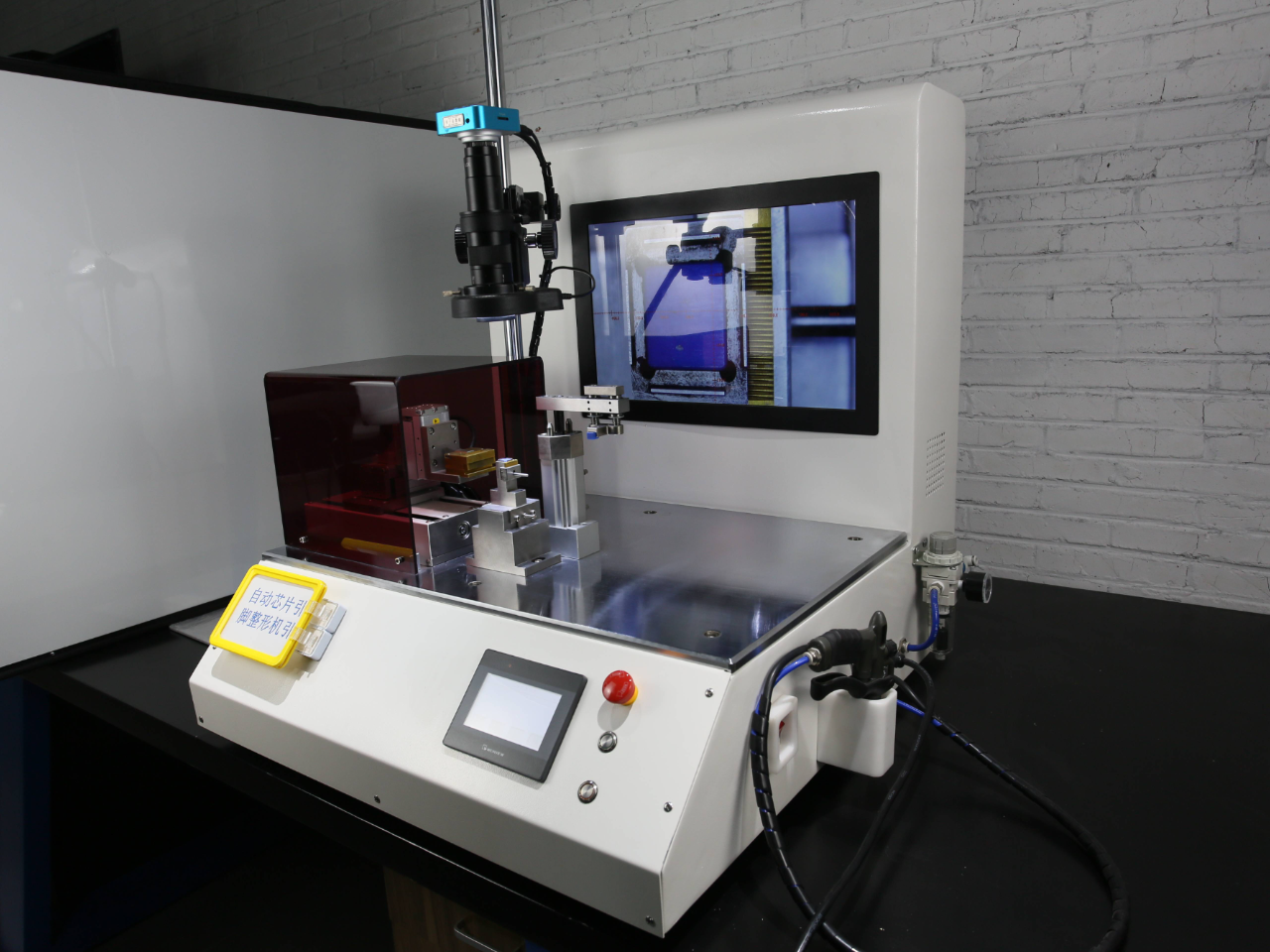
TR-50S 芯片引腳整形機的機械手臂通常采用高精度的伺服控制系統來實現對芯片引腳的高精度整形。機械手臂通過與高精度X/Y/Z軸驅動系統的配合,可以實現精確定位和運動控制。X/Y/Z軸驅動系統通常采用伺服電機和精密滾珠絲杠等高精度運動部件組成,能夠實現微米級別的運動精度。在整形過程中,機械手臂首先將芯片放置在定位夾具上,然后根據預設的整形程序,通過高精度X/Y/Z軸驅動系統實現芯片引腳的精確定位和調整。伺服控制系統可以實時監測和調整運動位置和速度,以確保整形過程的精確性和穩定性。此外,機械手臂還配備了高精度的傳感器和反饋系統,可以實時檢測芯片引腳的形狀和位置信息,并根據反饋信息調整運動軌跡和整形程序,以確保良好的整形效果。總之,半自動芯片引腳整形機的機械手臂通過與高精度X/Y/Z軸驅動系統的配合,可以實現高精度的運動控制和整形過程,確保每個芯片引腳都能夠得到良好的修復效果。半自動芯片引腳整形機的使用環境和條件有哪些要求?上海智能芯片引腳整形機銷售廠
半自動芯片引腳整形機在故障時如何進行排查和維修?上海制造芯片引腳整形機設備
TR-50S芯片引腳整形機組成半導體芯片引腳整形機主要由以下幾部分組成:機械系統:引腳整形機的主要機械結構通常包括夾具、驅動機構和等。夾具用于固定芯片,驅動機構用于驅動引腳的移動和變形,則確保引腳能夠準確地對準目標位置。系統:系統是引腳整形機的部分,它負責機器的各種動作,包括引腳的彎曲、修剪、調整等。系統通常由計算機、各種傳感器組成,通過接收操作員的指令和傳感器的反饋,精確引腳的整形過程。驅動系統:驅動系統是引腳整形機的動力來源,它由各種電機、傳動裝置等組成,負責驅動引腳的移動和變形。驅動系統需要具備高精度和高穩定性的特點,以確保引腳整形過程的準確性。檢測系統:檢測系統用于檢測引腳的位置和狀態,以確保整形過程的一致性和準確性。檢測系統通常由高分辨率的攝像頭、圖像處理算法等組成,能夠實時獲取引腳的位置和狀態信息,并將這些信息反饋給系統。輔助裝置:引腳整形機還需要一些輔助裝置,如冷卻系統、潤滑系統等,以確保機器的正常運行和延長使用壽命。綜上所述,半導體芯片引腳整形機是由機械系統、系統、驅動系統、檢測系統和輔助裝置等組成的復雜設備。這些組成部分協同工作,確保引腳整形過程的準確性。 上海制造芯片引腳整形機設備
- 南京自動化芯片引腳整形機共同合作 2025-05-14
- 南京芯片引腳整形機租賃 2025-05-14
- 上海智能芯片引腳整形機原理 2025-05-14
- 黑龍江全電腦控制返修站圖片 2025-05-12
- 哪里有全電腦控制返修站技術指導 2025-05-12
- 海南全自動全電腦控制返修站 2025-05-12
- 河南全電腦控制返修站共同合作 2025-05-12
- 廣東全電腦控制返修站拆裝 2025-05-09
- 上海制造芯片引腳整形機售后服務 2025-05-09
- 上海制造芯片引腳整形機設備 2025-05-09
- 上海大型不銹鋼廚房設備推薦貨源 2025-05-15
- 上海i系列阿法拉伐換熱器墊片 2025-05-15
- 西城區異徑止回閥型號 2025-05-15
- 東城區智能技術開發常見問題 2025-05-15
- 寧夏壁紙原紙機設備 2025-05-15
- 河南PE造粒機型號 2025-05-15
- 江蘇國產數控銑床 2025-05-15
- 全自動光學鍍膜設備哪家好 2025-05-15
- 福建轉子滴漆機保養 2025-05-15
- 廣州UDP量產開卡機 2025-05-15