-
溫始地送風(fēng)風(fēng)盤(pán) —— 革新家居空氣享受的藝術(shù)品
-
溫始·未來(lái)生活新定義 —— 智能調(diào)濕新風(fēng)機(jī)
-
秋季舒適室內(nèi)感,五恒系統(tǒng)如何做到?
-
大眾對(duì)五恒系統(tǒng)的常見(jiàn)問(wèn)題解答?
-
五恒空調(diào)系統(tǒng)基本概要
-
如何締造一個(gè)舒適的室內(nèi)生態(tài)氣候系統(tǒng)
-
舒適室內(nèi)環(huán)境除濕的意義
-
暖通發(fā)展至今,怎樣選擇當(dāng)下產(chǎn)品
-
怎樣的空調(diào)系統(tǒng)ZUi值得你的選擇?
-
五恒系統(tǒng)下的門(mén)窗藝術(shù):打造高效節(jié)能與舒適并存的居住空間
核電智能執(zhí)行器設(shè)備
電動(dòng)執(zhí)行機(jī)構(gòu)的選型流程中的功能驗(yàn)證環(huán)節(jié)。測(cè)試故障位置保護(hù)功能是其中的一個(gè)重要部分。例如,備用電源和彈簧復(fù)位功能的測(cè)試。在一些關(guān)鍵的工業(yè)系統(tǒng)中,如果主電源突然中斷,備用電源能夠確保執(zhí)行機(jī)構(gòu)繼續(xù)完成當(dāng)前的操作或者將閥門(mén)置于安全位置。彈簧復(fù)位功能則是在執(zhí)行機(jī)構(gòu)失去動(dòng)力或者發(fā)生故障時(shí),利用彈簧的力量將閥門(mén)恢復(fù)到預(yù)設(shè)的安全位置。另外,通信協(xié)議兼容性的測(cè)試也不容忽視。在現(xiàn)代工業(yè)自動(dòng)化系統(tǒng)中,不同的設(shè)備之間需要通過(guò)通信協(xié)議進(jìn)行數(shù)據(jù)交互,如HART協(xié)議、現(xiàn)場(chǎng)總線協(xié)議等。確保電動(dòng)執(zhí)行機(jī)構(gòu)與其他設(shè)備之間的通信協(xié)議兼容,能夠保證整個(gè)系統(tǒng)的信息流暢傳輸,避免出現(xiàn)數(shù)據(jù)丟失或者設(shè)備之間無(wú)法協(xié)同工作的情況。 電動(dòng)執(zhí)行機(jī)構(gòu)是一種將電能轉(zhuǎn)換為機(jī)械運(yùn)動(dòng)的裝置,主要用于工業(yè)自動(dòng)化系統(tǒng)中。核電智能執(zhí)行器設(shè)備
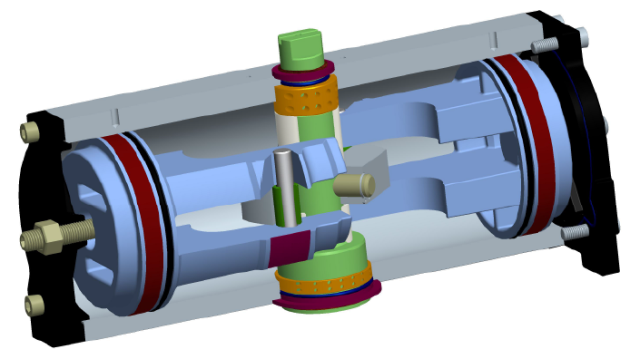
日常維護(hù)與潤(rùn)滑管理是確保電動(dòng)執(zhí)行機(jī)構(gòu)長(zhǎng)期穩(wěn)定運(yùn)行的關(guān)鍵因素,如同對(duì)精密機(jī)械的精心呵護(hù),每一個(gè)環(huán)節(jié)都不可或缺。 日常維護(hù)涵蓋多個(gè)方面:清潔執(zhí)行機(jī)構(gòu)表面及散熱結(jié)構(gòu),防止粉塵堆積影響散熱;檢查閥位指示準(zhǔn)確性及故障報(bào)警代碼;驗(yàn)證備用電源或彈簧復(fù)位功能。潤(rùn)滑管理方面,每季度需對(duì)閥桿、驅(qū)動(dòng)軸套及齒輪箱補(bǔ)充高溫鋰基脂,并清理舊油脂殘留。對(duì)于直行程執(zhí)行機(jī)構(gòu),需定期檢查推力軸承磨損情況,必要時(shí)更換密封組件,防止介質(zhì)泄漏。核電撥叉式執(zhí)行器組件撥叉式氣動(dòng)執(zhí)行機(jī)構(gòu)配合行程限位器和位置傳感器,可以實(shí)現(xiàn)對(duì)閥門(mén)開(kāi)度的精確調(diào)節(jié)。

閥門(mén)執(zhí)行機(jī)構(gòu)的多樣化驅(qū)動(dòng)方式是其適應(yīng)各種復(fù)雜工況的關(guān)鍵。不同的工況對(duì)能源類(lèi)型有著不同的要求,而閥門(mén)執(zhí)行機(jī)構(gòu)支持電動(dòng)、氣動(dòng)、液動(dòng)等多種能源類(lèi)型,這就為其在眾多領(lǐng)域的廣泛應(yīng)用奠定了基礎(chǔ)。電動(dòng)執(zhí)行機(jī)構(gòu)依靠電力驅(qū)動(dòng),這種方式通常適用于對(duì)控制精度要求較高的場(chǎng)合。例如在一些高精度的電子芯片制造車(chē)間,對(duì)于潔凈室內(nèi)的氣體流量控制要求極高,電動(dòng)執(zhí)行機(jī)構(gòu)能夠憑借其穩(wěn)定的電力供應(yīng)和精確的控制能力,滿足這種嚴(yán)苛的生產(chǎn)環(huán)境需求。氣動(dòng)執(zhí)行機(jī)構(gòu)則是利用壓縮空氣作為動(dòng)力源,它的比較大優(yōu)勢(shì)在于響應(yīng)速度快。在一些需要快速反應(yīng)的系統(tǒng)中,如某些自動(dòng)化的沖壓設(shè)備生產(chǎn)線,當(dāng)需要瞬間改變閥門(mén)狀態(tài)來(lái)控制氣體或液體的流動(dòng)時(shí),氣動(dòng)執(zhí)行機(jī)構(gòu)能夠迅速地完成動(dòng)作。液動(dòng)執(zhí)行機(jī)構(gòu)以液壓油為動(dòng)力,其輸出力矩較大。在大型水利工程中的水閘控制,或者重型機(jī)械制造中的大型液壓系統(tǒng)中,液動(dòng)執(zhí)行機(jī)構(gòu)能夠輕松應(yīng)對(duì)高壓大口徑閥門(mén)的控制需求,因?yàn)樗軌蛱峁┳銐虼蟮牧α縼?lái)驅(qū)動(dòng)這些大型閥門(mén)的開(kāi)閉。
在食品飲料行業(yè),無(wú)菌灌裝是保證產(chǎn)品質(zhì)量和安全的重要環(huán)節(jié)。例如在啤酒發(fā)酵罐的生產(chǎn)過(guò)程中,溫控閥門(mén)起著至關(guān)重要的作用。啤酒發(fā)酵需要在特定的溫度下進(jìn)行,溫度的微小波動(dòng)都可能影響啤酒的品質(zhì)。電動(dòng)執(zhí)行機(jī)構(gòu)控制的溫控閥門(mén)需要滿足衛(wèi)生級(jí)設(shè)計(jì)標(biāo)準(zhǔn),即無(wú)死角、易清潔。這種設(shè)計(jì)標(biāo)準(zhǔn)是為了防止細(xì)菌在閥門(mén)內(nèi)部滋生,從而保證啤酒發(fā)酵過(guò)程的無(wú)菌環(huán)境。在其他食品飲料的生產(chǎn)過(guò)程中,如飲料的灌裝、食品的加工等環(huán)節(jié),電動(dòng)執(zhí)行機(jī)構(gòu)也被廣泛應(yīng)用于溫度控制、流量控制等方面,確保產(chǎn)品的質(zhì)量和安全。撥叉式氣動(dòng)執(zhí)行機(jī)構(gòu)特別適用于需要較大轉(zhuǎn)矩輸出的應(yīng)用場(chǎng)景,例如大型蝶閥或球閥的開(kāi)關(guān)控制。

在現(xiàn)代工業(yè)自動(dòng)化控制系統(tǒng)中,電動(dòng)執(zhí)行機(jī)構(gòu)扮演著至關(guān)重要的角色。隨著工業(yè)生產(chǎn)的不斷發(fā)展,對(duì)于精確控制各種設(shè)備的需求日益增長(zhǎng),電動(dòng)執(zhí)行機(jī)構(gòu)應(yīng)運(yùn)而生。 電動(dòng)執(zhí)行機(jī)構(gòu)的工作起始于接收控制系統(tǒng)發(fā)出的標(biāo)準(zhǔn)電信號(hào),這種信號(hào)常見(jiàn)的有0 - 10V或4 - 20mA等類(lèi)型。這一信號(hào)的設(shè)定是基于工業(yè)界長(zhǎng)期的實(shí)踐和標(biāo)準(zhǔn)化的需求。例如,在化工生產(chǎn)中,對(duì)于反應(yīng)釜內(nèi)的溫度、壓力等參數(shù)的精確控制,就需要控制系統(tǒng)根據(jù)傳感器采集到的數(shù)據(jù),轉(zhuǎn)化為標(biāo)準(zhǔn)電信號(hào)發(fā)送給電動(dòng)執(zhí)行機(jī)構(gòu)。當(dāng)電動(dòng)執(zhí)行機(jī)構(gòu)接收到這個(gè)信號(hào)后,它就像一個(gè)忠誠(chéng)的執(zhí)行者,立即驅(qū)動(dòng)電機(jī)轉(zhuǎn)動(dòng)。經(jīng)過(guò)轉(zhuǎn)換后的動(dòng)力被傳遞到閥門(mén)或擋板等調(diào)節(jié)部件,帶動(dòng)它們完成位移或轉(zhuǎn)角控制。電動(dòng)執(zhí)行機(jī)構(gòu)的設(shè)計(jì)必須考慮到空間限制,一體化緊湊型結(jié)構(gòu)有助于節(jié)省安裝空間。化工閥門(mén)執(zhí)行機(jī)構(gòu)原理
撥叉式氣動(dòng)執(zhí)行機(jī)構(gòu)單作用型依靠彈簧復(fù)位原理工作,而雙作用型則依賴(lài)于兩個(gè)方向上的氣壓驅(qū)動(dòng)。核電智能執(zhí)行器設(shè)備
伺服放大器作為電動(dòng)執(zhí)行機(jī)構(gòu)的關(guān)鍵控制單元,具體工作流程可分為三個(gè)關(guān)鍵階段:信號(hào)綜合與偏差檢測(cè):系統(tǒng)接收來(lái)自DCS或調(diào)節(jié)器的標(biāo)準(zhǔn)信號(hào)(4-20mA DC)后,前置磁放大器將輸入信號(hào)與執(zhí)行機(jī)構(gòu)的位置反饋信號(hào)進(jìn)行綜合比較。磁放大器內(nèi)部采用四組坡莫合金環(huán)結(jié)構(gòu),通過(guò)偏移繞組和反饋繞組實(shí)現(xiàn)信號(hào)疊加,產(chǎn)生與偏差成比例的電壓信號(hào)。功率放大與驅(qū)動(dòng)控制:當(dāng)檢測(cè)到偏差時(shí),觸發(fā)電路將偏差信號(hào)轉(zhuǎn)換為晶閘管的觸發(fā)脈沖。正偏差觸發(fā)固態(tài)繼電器導(dǎo)通,驅(qū)動(dòng)電機(jī)正轉(zhuǎn);負(fù)偏差則觸發(fā)反向回路,電機(jī)反轉(zhuǎn)。新型伺服放大器采用過(guò)零觸發(fā)固態(tài)繼電器技術(shù),既能輸出高達(dá)150VA的驅(qū)動(dòng)功率,又避免了電網(wǎng)污染。閉環(huán)動(dòng)態(tài)調(diào)節(jié):執(zhí)行機(jī)構(gòu)動(dòng)作時(shí),位置發(fā)送器實(shí)時(shí)將閥位轉(zhuǎn)換為電阻或電流信號(hào)反饋至輸入端。當(dāng)反饋信號(hào)與輸入信號(hào)的差值小于死區(qū)閾值(通常±1%)時(shí),觸發(fā)電路停止輸出,電機(jī)進(jìn)入制動(dòng)狀態(tài)。這種PID調(diào)節(jié)機(jī)制可使定位精度達(dá)到±0.5% FS,重復(fù)誤差不超過(guò)±0.1%。核電智能執(zhí)行器設(shè)備
- 智能水面漂浮物收集器哪家好 2025-05-29
- 公園河道水面漂浮物收集器多少錢(qián) 2025-05-29
- 景區(qū)多功能水面垃圾收集器多少錢(qián) 2025-05-29
- 景區(qū)自動(dòng)水上垃圾收集器備件 2025-05-29
- 鋼鐵廠壓軌器防松動(dòng)螺栓生產(chǎn)商 2025-05-29
- 公園湖面水面垃圾收集器技術(shù) 2025-05-29
- 河面水面垃圾收集器哪家好 2025-05-29
- 景區(qū)湖面水面垃圾收集器原理 2025-05-29
- 景區(qū)高效水面漂浮物收集器廠家 2025-05-29
- 景區(qū)多功能水面垃圾收集器哪家好 2025-05-28
- 河北進(jìn)口伺服減速箱銷(xiāo)售電話 2025-05-29
- 鋁合金車(chē)身立柱價(jià)位 2025-05-29
- 江蘇銅套廠家 2025-05-29
- 廣州節(jié)流元件電子膨脹閥市場(chǎng)價(jià)格 2025-05-29
- 上海臺(tái)式凍干機(jī)咨詢(xún)問(wèn)價(jià) 2025-05-29
- 本地變壓器常用知識(shí) 2025-05-29
- 上海小型玻璃漏料中試熔爐公司 2025-05-29
- 江西特殊琛鑫輕創(chuàng)營(yíng) 2025-05-29
- 湖北鋼筋籠滾籠焊接機(jī)公司 2025-05-29
- 杭州哪里有五金加工工廠 2025-05-29