多工位視覺點膠系統配置
視覺點膠系統的安裝和調試時間取決于多個因素,包括系統規模、復雜程度和客戶要求。下面是一般情況下的安裝和調試時間估計:安裝時間:通常需要幾天到幾周的時間來完成系統的物理安裝。這包括設備的擺放、傳感器和攝像頭的安裝、電氣接線等。軟件配置和編程:視覺點膠系統需要進行軟件配置和編程,以確保系統正常運行并符合客戶要求。這一過程通常需要幾天到幾周的時間,具體取決于系統復雜度和客戶需求的定制程度。調試和優化:安裝完成后,需要進行調試和優化以保證系統的性能和精度。這個階段需要需要幾天到幾周的時間,以確保點膠位置準確、速度和壓力適宜,并進行一些測試和驗證。視覺點膠系統支持MES通訊協議,方便與各類設備組網協作。多工位視覺點膠系統配置
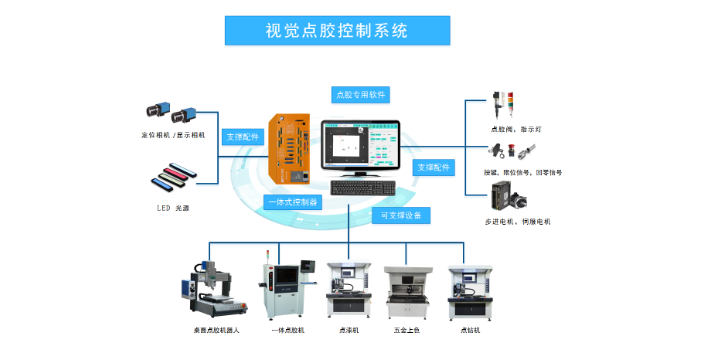
點膠,作為一種常見工序,幾乎在各行各業的有涉及,比如電子行業、汽車、服裝鞋子、飾品、集成電路、半導體封裝、印刷行業、顯示屏、音響等等。目前,隨著生產產品的高要求化,人們對精密點膠機的要求也越來越高,傳統的點膠機需要定制的夾具,人工把產品擺上夾具才能完成下一步的點膠工作,具有效率低,精度低的特點,已經不能適應如今高精度、高效率和智能化方向發展。而帶有“視覺”功能的全自動視覺點膠機,視覺即具有人眼功能的作用。一般來說,視覺點膠系統包括了光源、鏡頭、攝像系統和圖像采集與處理系統。在點膠工作中,帶視覺系統的點膠機連接PC端進行工作,可隨意調節各種工作參數,如出膠量,出膠時間,復雜路徑編輯等。搭配了視覺系統的點膠機能在效率上得到了大幅提升,并且點膠十分精確,能有效控制點膠量,誤差值控制在;能解決目前工廠面臨的招工難、用工荒的問題,將工廠的成本極大的降低,因此在市面上備受大家推崇。旗眾智能為點膠機設備研發出的視覺點膠控制系統VMC0400采用全景視覺高精度定位系統及專業點膠軟件,能夠精確的定位拾取工件的位置和待放工件點膠的位置,可以快速識別工件,自動路徑生成,實時動態顯示加工軌跡,以實現更高速。上海大視野視覺點膠系統公司視覺點膠系統搭載高清攝像頭,捕捉微小細節,保障點膠精度。
操作視覺點膠系統需要操作人員具備以下技能:機械知識:操作人員應該了解視覺點膠系統的基本組成結構和工作原理,包括機械部件、傳動系統和液壓系統等。他們需要知道如何正確操作和調整機械裝置,以確保系統的正常運行。視覺系統知識:操作人員需要熟悉視覺系統的原理和功能,了解如何調整和校準相機、光源以及圖像處理軟件等。他們應該能夠識別出視覺系統需要出現的問題,并采取適當的措施進行調整和修復。程序編寫能力:一些視覺點膠系統可以通過編程來控制和配置。操作人員需要具備基本的編程知識,能夠了解和修改點膠程序、運動軌跡和參數設置等。他們應該能夠使用相關軟件對程序進行調試和優化。機器操作技能:操作人員需要具備良好的機器操作技能,包括正確啟動和關閉系統、調整參數、操作控制面板、觀察并理解機器運行狀態指示等。他們應該能夠熟練地操作機器,并能夠迅速處理一些常見的故障和問題。
流水線視覺點膠系統:它是一款專門適用于流水線點膠作業的系統,完美實現設備廠商要求的“左進右出”加工模式,即流水線左側自動進料,中間加工,右側出料。它比較大的特點就是同步控制點膠產品的運動速度,與高速點膠閥完美配合,能夠切換自如地應對不同路徑的點膠。適用于產品批量點膠加工,可一直保持運動,定位準確,工件可隨意擺放,支持CAD編輯及導圖,多產品混合加工(不同高度、不同尺寸),既能實現像機械手一樣可實現高自由度、全方面無死角的點膠作業,又能輕松實現與現有產線的無縫對接。 視覺點膠系統具有數據追溯功能,完整記錄點膠工藝參數。

深圳市旗眾智能視覺點膠系統:如果你的行業需要運用到點膠技術,那么我們旗眾智能的視覺點膠系統你一定不要錯過。旗眾智能有著十年的視覺點膠系統的研發生產經驗,提供多方位的視覺點膠解決方案,可以集成在你的點膠機上,能夠讓你的點膠機搭載視覺功能,我們提供完善的技術支持及現場調試服務,為您的設備增效降本,無需培養工業視覺人才,也無需組建視覺部門,讓你實現利益比較大化,因為我們旗眾智能的點膠系統就是你的視覺部門。視覺點膠系統采用高速視覺采集,提升點膠響應速度。杭州視覺點膠系統單位
視覺點膠系統憑借視覺引導技術,減少人工干預,降低誤差率。多工位視覺點膠系統配置
在設計視覺點膠系統的路徑時,需要考慮以下幾個因素:點膠位置:首先確定點膠的目標位置,即將膠水應用到工件上的具體的位置。這需要考慮點膠的精度要求、工件的形狀和尺寸等因素。點膠位置的準確性對于點膠系統的路徑設計非常重要。動作順序:確定點膠系統的動作順序,包括運動路徑和點膠動作之間的先后關系。操作人員需要考慮先后順序,以確保點膠過程的連續性和有效性。通常,點膠路徑設計應盡量避免重復移動和不必要的停頓。路徑規劃:路徑規劃是確定點膠系統如何從起始位置移動到目標點膠位置的過程。在路徑規劃中,需要考慮路徑的非常短、非常快或較好化等目標,并避免與工件或其他障礙物的碰撞。例如,可以使用路徑規劃算法,如A*算法、Dijkstra算法等,來自動規劃較好路徑。多工位視覺點膠系統配置
- 惠州噴膠機視覺點膠系統價格 2025-05-31
- 上海大視野視覺點膠系統配置 2025-05-31
- 中山大視野視覺點膠系統服務熱線 2025-05-31
- 惠州高速視覺點膠系統推薦廠家 2025-05-31
- 上海在線式跟蹤視覺點膠系統配置 2025-05-31
- 深圳全景單工位視覺點膠系統哪家靠譜 2025-05-31
- 東莞桌面視覺點膠系統公司 2025-05-31
- 東莞桌面視覺點膠系統定制 2025-05-31
- 深圳3D視覺點膠系統成熟好用 2025-05-31
- 廣州桌面視覺點膠系統網站 2025-05-31
- 天津紅沖加熱爐廠家電話 2025-06-01
- 山西變壓器縱剪機 2025-06-01
- 江蘇真空腔體電解拋光哪家好 2025-06-01
- 云南手動真空包裝機常用知識 2025-06-01
- 河南開利1050開利冷藏設備回收 2025-06-01
- 山西自動化起重設備安裝 2025-06-01
- 東莞5軸精密零件加工市價 2025-06-01
- 杭州銅漿攪拌機供應 2025-06-01
- 湖南機器人弧焊自動化生產線服務商 2025-06-01
- 伺服電機裝配供應 2025-06-01